1
/
de
17
Vitrax
Kit bras robotisé de bureau Waveshare 25118 RoArm-M2-S, basé sur ESP32, 4 degrés de liberté (prise UE)
Kit bras robotisé de bureau Waveshare 25118 RoArm-M2-S, basé sur ESP32, 4 degrés de liberté (prise UE)
Prix habituel
£233.76 GBP
Prix habituel
Prix promotionnel
£233.76 GBP
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Quantité
Impossible de charger la disponibilité du service de retrait
1. Nombre de degrés de liberté : 4
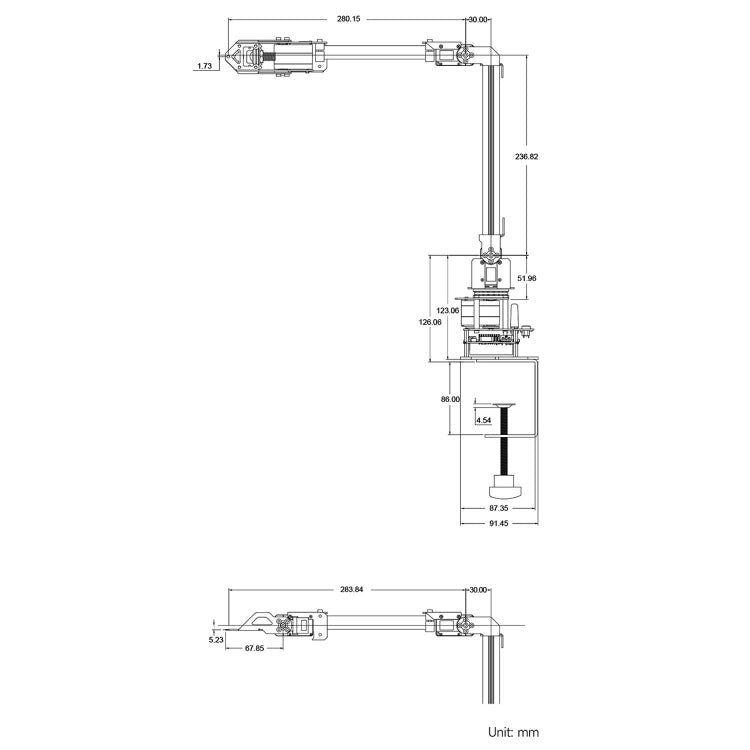
2. Espace de travail : diamètre horizontal 1090 mm (max., omnidirectionnel à 360 degrés), portée verticale 798 mm (max.)
3. Tension de fonctionnement : alimentation standard 12 V 5 A, peut être alimenté par une batterie au lithium 3S
4. Capacité de charge : 0,5 kg à 0,5 m
5. Précision de positionnement répétée : environ +/- 4 mm (même charge)
6. Vitesse de rotation de l'entraînement : 40 tr/min (sans charge, sans limite de couple)
7. Plage de travail : BASE-360 degrés, ÉPAULE-180 degrés, COUDE-180 degrés, MAIN-135 degrés/270 degrés
8. Mode d'entraînement : servomoteur de bus TTL (TTL BUS SERVO), entraînement direct conjoint
9. Nombre de lecteurs : 5
10. Capteur d'angle d'articulation : codeur magnétique 12 bits à 360 degrés
11. Couple de décrochage du conducteur : 30 kg/cm à 12 V
12. Informations de retour d'information sur les articulations : état du pilote, angle de l'articulation, vitesse de rotation, charge de l'articulation, tension du pilote, courant du pilote, température du pilote, mode de fonctionnement du pilote
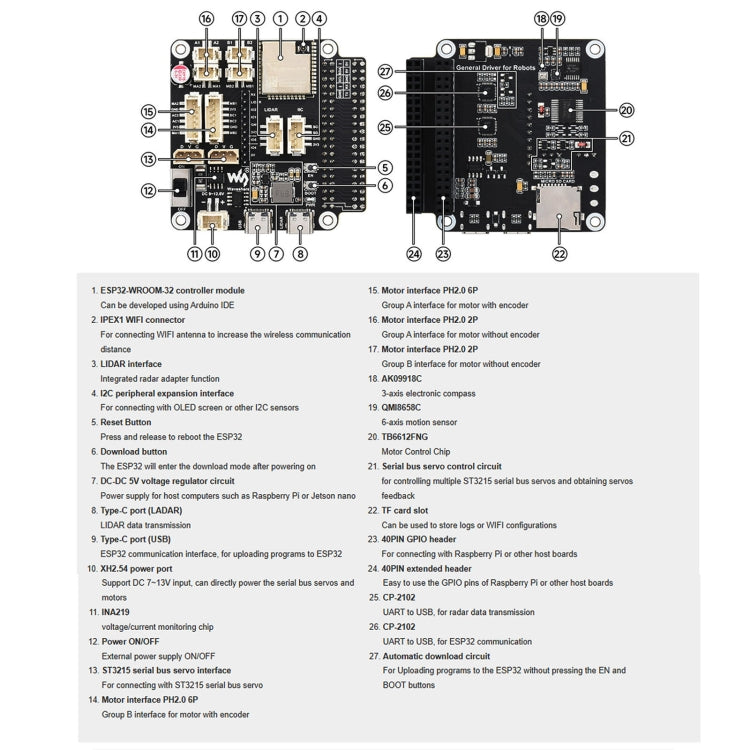
13. Contrôle maître embarqué : ESP32-WROOM-32
14. Caractéristiques du module de contrôle principal embarqué : WiFi, BT, Dual Core, 240 MHz
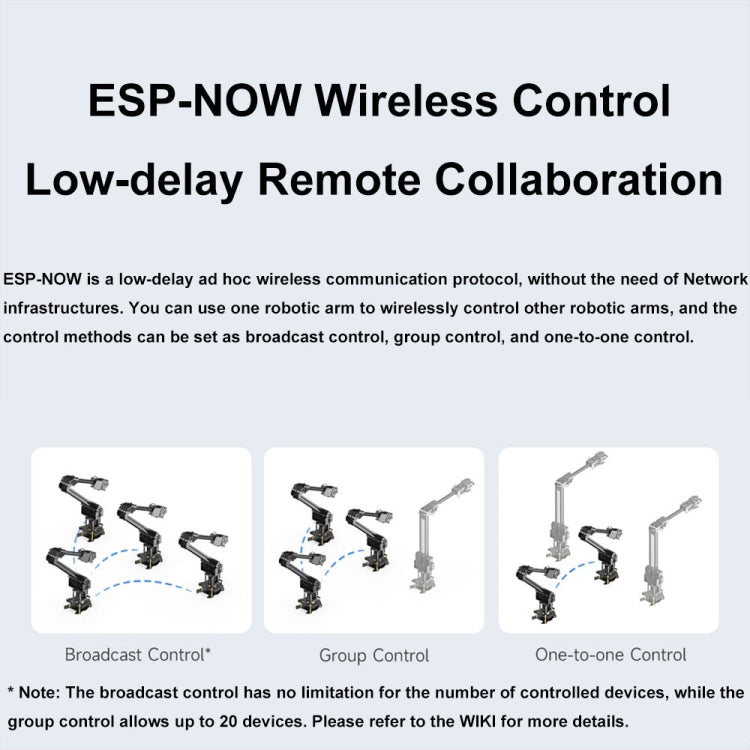
15. Méthode de contrôle sans fil : 2,4G-WiFi, ESP-NOW
16. Méthode de contrôle filaire : USB, UART
17. Méthode de fonctionnement manuel : interface de contrôle WEB
18. Méthode de fonctionnement de la machine : Utiliser les instructions de format de données JSON de communication UART/USB/ESP-NOW/HTTP (actuellement, l'interaction de l'instruction JSON ESP-NOW dans la routine n'a aucune information de retour et ne peut pas être utilisée pour exécuter des instructions qui provoqueront un blocage à long terme, telles que : le contrôle de mouvement avec interpolation ou la lecture de fichiers de tâches à long terme)
19. Ordinateur hôte connectable : Raspberry Pi, Jetson Orin Nano, PC et autres appareils compatibles USB. Fonction d'effecteur : la fonction par défaut est la fonction mandrin, qui peut être modifiée pour un degré de liberté supplémentaire.
20. Puissance de la lumière d'appoint LED : moins de 1,5 W
21. Taille de l'écran OLED : 0,91 pouce
22. Autres fonctions embarquées : deux interrupteurs 12 V, IMU 9 DOF
23. Poids du bras du robot : environ 841 g (hors pince de table)
24. Poids de la pince de table : environ 296 g
25. Épaisseur de la table supportée par la pince de table : moins de 72 mm
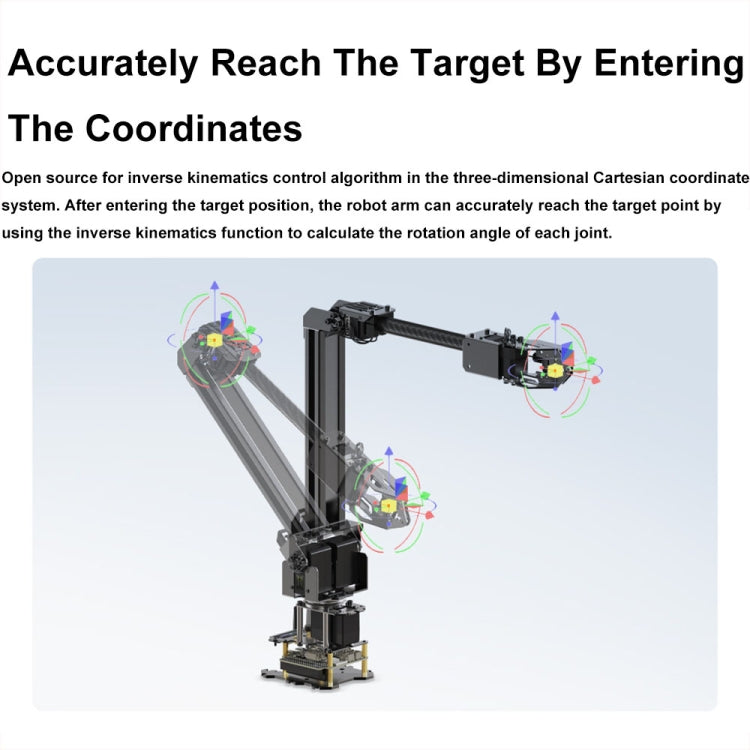
26. Fonctions de routine du bras robotisé : contrôle du système de coordonnées rectangulaires tridimensionnel (contrôle de la cinématique inverse), contrôle de l'adaptation dynamique des forces externes, contrôle de l'angle des articulations, retour d'informations de travail, fonctionnement du système de fichiers FLASH, enregistrement et lecture des étapes, contrôle ESP-NOW, mode imitation (apprentissage par glissement), contrôle de l'éclairage LED, contrôle de l'interrupteur 12 V embarqué, réglages des fonctions Wi-Fi, configuration de la tâche de mise sous tension, réglages des fonctions liées au servo de bus, réglages du mode de retour, réglages de la méthode d'assemblage final, etc. Remarque : ceci n'est qu'une introduction générale. Pour les fonctions spécifiques et les instructions associées aux routines open source, veuillez vous référer à WKI.
Liste de colisage:
-Bras robotique x 1
-Chargeur x 1
- Base d'extension de guide x 1
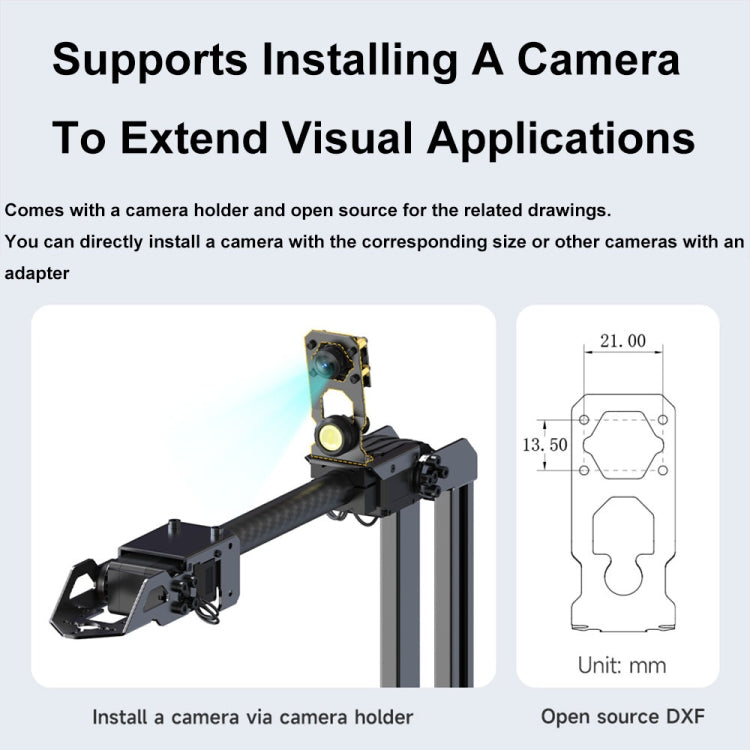
-Support de caméra x 1
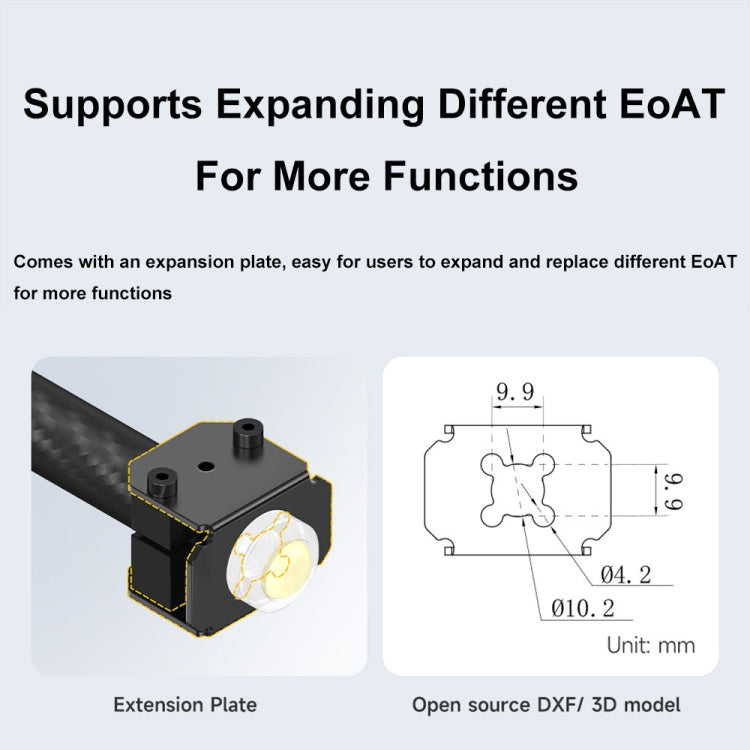
-Support d'extension d'extrémité x 1
-Base légère x 1
-Sac d'accessoires x 1
Spécification:
| Poids du colis |
|
Share